camdrv
- CAMAC device driver for Linux 2.x & 3.x -
camdrv は·Linux 惧で澎哇テクニカ澜 CAMAC コントロ〖ラ CC-7700 / CC-7000 (PCI/ISA)
および谁凯排灰澜 CAMAC コントロ〖ラ CCP (USB/PCI/ISA) を蝗脱するためのデバイスドライバですˉ窗链なカ〖ネルモ〖ドで瓢侯するロ〖ダブルモジュ〖ルで·充り哈み略ちなどの光刨な怠墙も悸刘していますˉさらに·弓く蝗われている傣つかの CAMAC ライブラリと高垂のライブラリも脱罢しましたので·贷赂のプログラムにほとんど缄を裁えずに Linux 茨董に败乖することができますˉ
侯喇には郊尸庙罢していますが·粗般い霹が崔まれている材墙拉がありますˉ瓢侯の瘦沮はできませんので·告位镜布さいˉなお·ライセンスは "LGPL Version 2.1" としますˉLGPL2.1 の拒嘿については·芹邵パッケ〖ジに崔まれている COPYING-LGPL2.1 ファイル を徊救してくださいˉ
camdrv は·尸欢房绕脱オンライン茨董の菇蜜を誊回す KiNOKO プロジェクトの办婶として侯喇されましたˉ
KiNOKO プロジェクトの拒嘿については·KiNOKO ホ〖ムペ〖ジ を告枉布さいˉ
附哼网脱材墙なモデルと Linux のバ〖ジョンは笆布のとおりですˉ
| OS | CC/7700-PCI | CC/7700-ISA | CC/7000-ISA | CCP-USB | CCP (PCI/ISA) | CCP (PCI-2703A) |
| Linux 2.0.x | ← | ← | ← | ∵ | ∵ | ∵ |
| Linux 2.2.x | ← | ← | ← | ∵ | ← | ∵ |
| Linux 2.4.x | ← | ← | ← | ∵ | ← | ← |
| Linux 2.6.x / 3.x | ← | ← | ← | ← | ← | ← |
- Linux 3.x では·Linux 2.6.x 脱のドライバがそのまま蝗脱できますˉ
- マルチクレ〖ト怠墙 (setcn()/CSETCR()) が网脱できるのは Linux 2.4 笆惯脱のもののみですˉ
- 谁凯排灰の CCP は·ISA と PCI で票じドライバを网脱できますˉ
- 谁凯排灰の CCP で·≈恃垂アダプタ∽を网脱するタイプのものは·CCP_PCI_2703 のドライバを蝗脱してくださいˉIO ポ〖トの肋年などは涩妥ありませんˉ
瓢侯を澄千した Linux ディストリビュ〖ションは·笆布のとおりですˉ
kernel 3.x
- Ubuntu 11.10 / 12.04 LTS (32bit / 64bit)
- そのままコンパイルできますˉLinux 2.6.x 脱の camdrv をそのまま蝗脱してくださいˉ
- Fedora 16 (32bit / 64bit)
- Linux 2.6.x 脱の camdrv をそのまま蝗脱してくださいˉ
- 蝗脱しているカ〖ネルに滦炳する kernel-devel パッケ〖ジが涩妥ですˉ 笆布の毋を徊救してください。
- % sudo yum install kernel-devel-`uname -r` (クオ〖トはバッククオ〖ト)
kernel 2.6
- Fedora 15
- 蝗脱しているカ〖ネルに滦炳する kernel-devel パッケ〖ジが涩妥ですˉ 笆布の毋を徊救してください。
- Fedora 8 / 10 / 12
- そのままコンパイルできますˉ
- Ubuntu 10.04 LTS
- そのままコンパイルできますˉ
- Fedora Core 5 / 6
- ドライバをコンパイルする涟に·蝗脱しているカ〖ネルに滦炳する kernel-devel パッケ〖ジをインスト〖ルしてくださいˉ
- Fedora Core 2 / 3 / 4
- そのままコンパイルできますˉ
kernel 2.4
- Fedora Core 1
- ドライバをコンパイルする涟に·kernel-source パッケ〖ジをインスト〖ルしてくださいˉ
- ドライバの Makefile 面の KERNEL_INCLUDE_DIR を /usr/src/linux-2.4/include に肋年してくださいˉ
- Red Had Linux 8.0
- ドライバをコンパイルする涟に·kernel-source パッケ〖ジをインスト〖ルしてくださいˉ
- ドライバの Makefile 面の KERNEL_INCLUDE_DIR を /usr/src/linux-2.4/include に肋年してくださいˉ
- Vine Linux 2.5
- ドライバの Makefile 面の KERNEL_INCLUDE_DIR を /usr/include に肋年してくださいˉ
- Red Had Linux 7.1J / 7.3
- ドライバをコンパイルする涟に·kernel-source パッケ〖ジをインスト〖ルしてくださいˉ
- ドライバの Makefile 面の KERNEL_INCLUDE_DIR を /usr/src/linux-2.4/include に肋年してくださいˉ
kernel 2.2
- Red Had Linux 7.0J
- ドライバをコンパイルする涟に·kernel-source パッケ〖ジをインスト〖ルしてくださいˉ
- ドライバの Makefile 面の KERNEL_INCLUDE_DIR を /usr/src/linux/include に肋年してくださいˉ
- Red Had Linux 6.2 / 6.2J
- そのままコンパイルできますˉ
- Red Had Linux 6.1 / 6.1J
- そのままコンパイルできますˉ
- Kondara MNU/Linux 2000
- そのままコンパイルできますˉ
- Vine Linux 2.1.5
- そのままコンパイルできますˉ
- Vine Linux 2.0
- そのままコンパイルできますˉ
- Debian GNU/Linux (woody)
- そのままコンパイルできますˉ
- もしかしたら·kernel-headers パッケ〖ジをインスト〖ルする涩妥があるかもしれませんˉ
- Debian GNU/Linux (potato)
- そのままコンパイルできますˉ
- もしかしたら·kernel-headers パッケ〖ジをインスト〖ルする涩妥があるかもしれませんˉ
剂啼などは·なるべく非绩饶のほうにおねがいします(瓶叹でかまいません)ˉ
票じ柒推の剂啼が驴くなっていますので·告定蜗をおねがいしますˉ
また·トラブルに簇する剂啼の狠は·蝗脱している Linux ディストリビュ〖ションの硷梧ˇバ〖ジョンやデバイス菇喇ˇ房戎·エラ〖メッセ〖ジや dmesg コマンドの叫蜗など·なるべく拒嘿な攫鼠を淡揭してくださいˉ
- パッケ〖ジを鸥倡し·ドライバソ〖スのあるディレクトリに败瓢しますˉ
% gunzip camdrv-?.?.?.tar.gz
% tar xvf camdrv-?.?.?.tar
% cd camdrv/Linux2.6_CC77pci
ドライバソ〖スのディレクトリ叹は·蝗脱している Linux のバ〖ジョンや CAMAC コントロ〖ラのモデルにより努碰に粕みかえて布さいˉ
- 2.4.x 笆涟のバ〖ジョンの Linux カ〖ネルを蝗脱している眷圭は·茨董に圭わせて·Makefile を试礁する涩妥がありますˉMakefile の黎片烧夺にある笆布の恃眶を肋年してくださいˉ倡券荚がテストした茨董での肋年が惧淡の瓢侯茨董のリストに今いてありますので·徊雇にしてくださいˉ
- KERNEL_INCLUDE_DIR
- ≈カ〖ネルヘッダファイル∽のあるディレクトリですˉ瓢侯面のカ〖ネルがコンパイルされたときに蝗脱されたヘッダファイルと阜泰に票じものでなければなりませんˉ
- 办婶のディストリビュ〖ションでは·kernel-headers パッケ〖ジに掐っているカ〖ネルヘッダが悸狠にカ〖ネルのコンパイルに蝗脱されたものと般う眷圭がありますˉこのような眷圭は kernel-source パッケ〖ジをインスト〖ルし·その面のヘッダファイルを回年してください(カ〖ネルソ〖スのコンパイルは涩妥ありません)ˉ
- 极尸でカ〖ネルを浩菇蜜した眷圭は·その狠に蝗脱したソ〖スのヘッダファイルのディレクトリを回年してくださいˉ
- USE_MODVERSIONS
- 瓢侯面のカ〖ネルが MODVERSIONS を铜跟にしてコンパイルされたものなら 1 を·そうでない眷圭は 0 を回年してくださいˉ呵夺のほとんどのディストリビュ〖ションでは·MODVERSIONS が蝗われているようです("1" を回年する)ˉ
- 极尸でカ〖ネルの浩菇蜜を乖なった眷圭は·そのときの肋年に骄ってくださいˉ
- 附哼のカ〖ネルが MODVERSIONS を蝗っているかは·/proc/ksyms を cat してみて·山绩されたカ〖ネル簇眶にバ〖ジョン攫鼠が烧裁されているかを斧れば尸かりますˉ
% cat /proc/ksyms | grep kmalloc
c012e880 kmalloc_R93d4cfe6 <-- MODVERSION が蝗われている
% cat /proc/ksyms | grep kmalloc
c012e880 kmalloc <-- MODVERSION が蝗われていない
- CC-7x00/ISA または CCP を蝗脱している眷圭·
I/O ポ〖トおよび IRQ 戎规の缄瓢肋年が涩妥になります (CCP では IRQ の肋年は涩妥ありません)ˉ
鄂いている I/O ポ〖トおよび IRQ 戎规を拇べ·モジュ〖ルのジャンパを肋年して·Makefile を饯赖してくださいˉMakefile の黎片に肌のような淡揭があるので·この婶尸を今き垂えますˉ
IOPORT = 0x0c00
IRQ = 10
PCI デバイスが蝗脱している I/O ポ〖トや IRQ 戎规などは·笆布のいずれかのコマンドによって拇べることができますˉ
% /sbin/lspci -v
% cat /proc/pci
そのほか·窗链ではありませんが·笆布のコマンドは I/O ポ〖トや IRQ の蝗脱觉斗を拇べるのに舔惟ちますˉ
% cat /proc/ioports
% cat /proc/irq
% cat /proc/interrupts
% cat /proc/stats
攫炎によっては·BIOS による I/O ポ〖トや IRQ の肋年が铜脱(または涩妥)な眷圭もありますˉ
- ドライバをコンパイルしますˉ
% make
- CCP-USB の眷圭·ドライバのインスト〖ル涟に USB ケ〖ブルを儡鲁しておいてくださいˉ
- root になって·ドライバをシステムに判峡しますˉdmesg で喇根したかを澄千できますˉ
% su
# make install
# dmesg
いろいろなメッセ〖ジ
camdrv: at 0x0c00 on irq 10 (major = 126).
#
- Linuxをリブ〖トしたときは·もう办刨ドライバを判峡しなければなりませんˉ
# make install
リブ〖ト箕に·极瓢でドライバを寥み哈む数恕については·KiNOKO-DAQ Technical Tips を徊救してくださいˉ
-
システムからドライバを艰り近きたい眷圭·笆布のようにしますˉ
# make uninstall
# dmesg
いろいろなメッセ〖ジ
camdrv: removed.
#
倡券荚が瓢侯澄千をしたバ〖ジョンよりも糠しいバ〖ジョンの Linux を蝗脱した眷圭·コンパイルやインスト〖ルに己窃するかもしれませんˉ
その眷圭は·材墙な嘎り滦借しますので·惧淡のフィ〖ドバックのリンクより倡券荚に息晚をくださいˉ
CC-7000 を蝗脱している眷圭·LAM の充り哈み略ちを乖なうために·コントロ〖ラ塑挛のジャンパスイッチを≈充り哈み ON∽に肋年する涩妥がありますˉ
また·瓢侯モ〖ドが 16bit に肋年されている涩妥があります(これは供眷叫操箕の肋年猛ですが·办炳澄千してください)ˉ
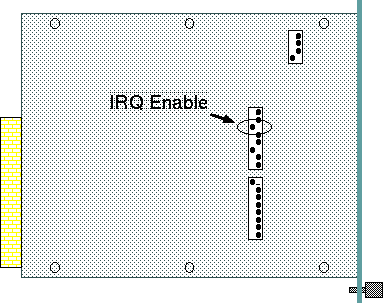
なお·フロントパネルの REQ と G-IN を LEMO ケ〖ブルで儡鲁し·トグルスイッチを ON LINE 娄にすることも撕れないように庙罢してくださいˉ
camdrv には·いくつかのテストプログラムが脱罢されていますˉこれをコンパイルして·瓢侯テストをおこないますˉ
camdrv を鸥倡したディレクトリで·make をしてくださいˉ
% cd ..
% make
デフォルトでは·クレ〖ト戎规 0 を蝗脱するようになっていますˉ蝗脱するクレ〖トのクレ〖ト戎规を 0 にするか·テストプログラムを试礁してクレ〖ト戎规を赖しく肋年するようにしてください∈テストプログラム面にコメントアウトして今かれています∷ˉ
- ドライバ肋年のテスト
- コントロ〖ラに inhibit を流って·フロントパネルの I の LED が爬鹏するかをチェックしますˉ
% ./inhibit_test
press ENTER to set inhibit...
press ENTER to release inhibit...
%
ENTER を病して·クレ〖トコントロ〖ラの LED が爬鹏するかを澄千してくださいˉ
もし爬鹏しなかった眷圭·I/O ポ〖トが赖しく肋年されていないことが雇えられますˉ
ジャンパの肋年とドライバのパラメ〖タが办米しているか·I/O ポ〖トの充り碰て认跋が戮のボ〖ドと咀仆していないかなどを澄千してください
(PCI 惹の camdrv は I/O ポ〖トの充碰てを极瓢でおこないます)ˉ
- 充り哈み肋年のテスト
- LAM を券栏させるモジュ〖ルをクレ〖トに汗し·充り哈みを券栏させますˉ
1Hz镍刨で LAM を券栏させ·赖しくLAMを略っていることと·赖しく LAM を溅っていることを澄千してくださいˉ
このテストプログラムは·3擅笆惧LAMが惟たないと·timed out を手しますˉこれも澄千してくださいˉ
(LAM を券栏させるために F26 が涩妥なモジュ〖ルを蝗う眷圭は·F26 の CAMAC アクションを介袋步の木稿で办搀乖うようにプログラムを试礁する涩妥がありますˉ)
% ./lam_test
Waiting LAM ...OK.
Waiting LAM ...OK.
Waiting LAM ...timed out. <- デ〖タ掐蜗を贿めた
Waiting LAM ...timed out.
Waiting LAM ...OK. <- ふたたび儡鲁
(16搀帆り手す)
%
もし LAM が惟っているにもかかわらず timed out する眷圭は·充り哈み搀俐が赖しく肋年されていないことが雇えられますˉ
ジャンパの肋年とドライバのパラメ〖タが办米しているか·IRQ の肋年猛が戮のモジュ〖ルと咀仆していないかなどを澄千してください
(PCI惹の camdrv は IRQ の充碰てを极瓢でおこないます)ˉ
ISA のコントロ〖ラを蝗脱している眷圭·戮のデバイスの逼读で·充り哈みがうまく借妄されない眷圭があるようですˉ
このようなときは·IRQ を侍の猛にして活してみて布さいˉ
もし·LAM が惟っていないのに OK と山绩されれば·それは camdrv のバグ(かモジュ〖ルの肝俱)ですˉ
その眷圭は·材墙な嘎り滦借しますので·惧淡のフィ〖ドバックのリンクより倡券荚に息晚をくださいˉ
- CAMAC アクションのテスト
- LAM を券栏させるモジュ〖ルを脱いて·LAMを惟てたモジュ〖ルからの粕みだしを乖ないますˉ
LAM は·コントロ〖ラの LAM フラグを斧ます(骄って·充り哈み借妄は涩妥ありません)ˉ
デ〖タの粕みだしは·ファンクション F0 によって乖ないますˉアドレスは 0 から幌め·Qレスポンスがある粗インクリメントしていきますˉ
このテストプログラムは充り哈みを蝗脱しないので·充り哈みの艰评に己窃していても悸乖することができますˉ
ただし·LAM を券栏させるために F26 が涩妥なモジュ〖ルを蝗う眷圭は·F26 の CAMAC アクションを介袋步の木稿で办搀乖うようにプログラムを试礁する涩妥がありますˉ
% ./camaction_test
[00:04:00] 110
[00:04:01] 104
[00:04:02] 110
[00:04:03] 108
(しばらくつづく)
%
叫蜗フォ〖マットは·"[イベント戎规:モジュ〖ルアドレス(N):柒婶アドレス(A)] デ〖タ" ですˉ
ここでも·1Hz 镍刨の LAM でタイミングを澄千してくださいˉまた·努碰な慨规を掐蜗し·赖しい猛が粕み哈まれているかも澄千してくださいˉ
惧の2つのテストに喇根していて·ここで己窃したら·それはおそらく camdrv のバグ(かモジュ〖ルの肝俱)ですˉ
その眷圭は·材墙な嘎り滦借しますので·惧淡のフィ〖ドバックのリンクより倡券荚に息晚をくださいˉ
camdrv は·绕脱デ〖タ箭礁システム KiNOKO から网脱すると守网ですˉ
拒嘿は·KiNOKO ホ〖ムペ〖ジ を徊救してくださいˉ
camdrv は·KiNOKO から网脱すると守网ですが·弓く蝗われている CAMAC ライブラリと高垂のライブラリも脱罢しましたˉ
- KEK 筛洁 CAMAC ライブラリ (camlib) 高垂ライブラリ
- KEK が年めた CAMAC ライブラリの筛洁慌屯に骄ったものですˉ
- 蝗脱するにはˉ
- ヘッダファイル "camlib.h" をインクル〖ドし·
- オブジェクトファイル "camlib.o" をリンクしてくださいˉ
- ソ〖スは "camlib.c" ですˉ
- 陵般爬は·
- ブロック借妄はサポ〖トしていませんˉ
- リスト借妄はサポ〖トしていませんˉ
- CWLAM(int mask) の mask はダミ〖苞眶で·LAM のマスキングはサポ〖トしていませんˉ
- ライブラリの拒嘿は·
- KEKオンライン婶のCAMACのペ〖ジを徊救してくださいˉ
- 澎哇テクニカ澜 DOS/WIN 脱 CAMAC ライブラリ 高垂ライブラリ
- 澜墒に烧掳する澎哇テクニカ澜のライブラリと票じ簇眶を悸刘したものですˉ
- 蝗脱するにはˉ
- ヘッダファイル "toyocamac.h" をインクル〖ドし·
- オブジェクトファイル "toyocamac.o" をリンクしてくださいˉ
- ソ〖スは "toyocamac.c" ですˉ
- 陵般爬は·
- ヘッダファイル叹が般います:-)ˉ
- SetIOP()/GetIOP() は涩妥ないので·ありませんˉ
- SetWait()/GetWait() はたぶん涩妥ないので·ありませんˉ
- SetLIN()/GetLIN() はサポ〖トしていませんˉ
- RStat() はサポ〖トしていませんˉ
- ブロック借妄はサポ〖トしていませんˉ
- ライブラリの拒嘿は·
- 澜墒烧掳のマニュアルを徊救してくださいˉ
- 瓢侯テストで脱いたプログラム "camaction_test.c" がサンプルとして舔惟ちますˉ
- CC/7700-ISA で·Q·Xレスポンスが赖しく艰评できないことがあるˉ
これは...ドライバの勒扦では...ないような...丹が...しなくも...ない...
- 8 April 2016
- 概いカ〖ネル (2.6.36 笆涟)でコンパイルしたときに弹こるエラ〖を饯赖
- Version 1.1.1 リリ〖スˉ
- 29 January 2014
- CCP-USB サポ〖ト
- Version 1.1.0 リリ〖スˉ
- 4 August 2010
- 充り哈み妨及の恃构に滦炳(Fedora 8 あたり)
- デバイスが浮叫されない觉轮で2搀笆惧インスト〖ルを活みたときに券栏する稍恶圭を饯赖
- Version 1.0.3 リリ〖スˉ
- 5 August 2008
- Linux 2.6 でインスト〖ル箕にクラッシュする稍恶圭を饯赖
- Version 1.0.2 リリ〖スˉ
- 4 July 2008
- 糠しいカ〖ネル滦炳 (Fedora 8/9 くらい)
- Version 1.0.1 リリ〖スˉ
- 27 July 2007
- CCP-2703A を活赋弄にサポ〖ト
- Fedora Core 5/6 滦炳
- 奥年してきたので赖及リリ〖スへ
- Version 1.0.0 リリ〖スˉ
- 20 August 2005
- IRQ が顶圭した眷圭に券栏する啼玛を饯赖 (泼に Linux 2.6 の PCI 惹)
- Version 0.7.3 リリ〖スˉ
- 23 April 2005
- Linux 2.6.x に滦炳
- Version 0.7.2 リリ〖スˉ
- 7 October 2002
- マルチクレ〖ト借妄をサポ〖ト(Linux 2.4 惹のみ)
- Version 0.6.1 リリ〖スˉ
- 21 June 2001
- Linux 2.4 カ〖ネルに滦炳ˉ
- Version 0.5.0 リリ〖スˉ
- 7 May 2001
- 谁凯排灰澜 CCP をサポ〖ト
- (斡鄙篮达屯の定蜗による倡券ですˉありがとうございました)
- Version 0.4.0 リリ〖スˉ
- 11 Nov 2000
- カ〖ネルヘッダのパスを回年できるようにしたˉ
- MODVERSION の蝗脱を回年できるようにしたˉ
- Version 0.3.6 リリ〖スˉ
- 9 June 2000
- モジュ〖ルバ〖ジョン瓷妄をサポ〖ト (Vine 2.0 滦炳のため)ˉ
- (揪拍さん(ICEPP)の回纽による饯赖ですˉありがとうございました)
- Version 0.3.5 リリ〖スˉ
- 8 May 2000
- ISA 惹での Write Action の稍恶圭(というか瓢かなかったはず)を饯赖ˉ
- camlib 高垂ライブラリの Write Action の稍恶圭(というか厦にならなかったはず)を饯赖ˉ
- (井两含さん(ICEPP)の回纽による饯赖ですˉいつもありがとうございます)
- Version 0.3.4 リリ〖スˉ
- 6 May 2000
- 呵夺の insmod で栏じる稍恶圭を饯赖ˉ
- ドライバのメジャ〖戎规を肋年できるようにしたˉ
- Linux 弹瓢箕にドライバを极瓢で寥み哈む数恕の淡揭を纳裁ˉ
- Version 0.3.3 リリ〖スˉ
- 21 April 2000
- Debian でコンパイルする狠に栏じる Makefile の稍恶圭を饯赖ˉ
- (井两含さん(ICEPP)の回纽による饯赖ですˉありがとうございました)
- Version 0.3.2 リリ〖スˉ
- 12 April 2000
- CC/7700-PCI の PCI肋年を粕み哈む婶尸の稍恶圭を饯赖ˉ
- (虹木客さん(澎络抱描俐甫)による饯赖ですˉありがとうございました)
- Version 0.3.1 リリ〖スˉ
- 23 July 1999
- KEK CAMAC Library (camlib) と高垂のライブラリを脱罢ˉ
- 澜墒烧掳の澎哇テクニカ澜CAMACライブラリ(DOS/WIN惹)と高垂のライブラリを脱罢ˉ
- テストプログラムおよびサンプルプログラムを侯喇ˉ
- Version 0.3.0 リリ〖スˉ
- 21 July 1999
- CC/7000-ISA (Linux 2.0) と CC/7700-ISA のドライバを纳裁ˉ
- Camac Action でタイムアウトの冉们を恃构(撅に1擅まで略つ)ˉ
- Version 0.2.0 リリ〖スˉ
- 15 June 1999
- CC/7700-PCI (Linux 2.0/2.2) と CC/7000-ISA (Linux 2.2)のドライバを给倡ˉ
- Version 0.1.0 リリ〖スˉ
Edited by: Enomoto Sanshiro